|
Pyrogenesis
trunk
|
Vertex-based algorithm for CCmpPathfinder. More...
#include "precompiled.h"#include "CCmpPathfinder_Common.h"#include "lib/timer.h"#include "ps/Profile.h"#include "simulation2/components/ICmpObstructionManager.h"#include "simulation2/helpers/PriorityQueue.h"#include "simulation2/helpers/Render.h"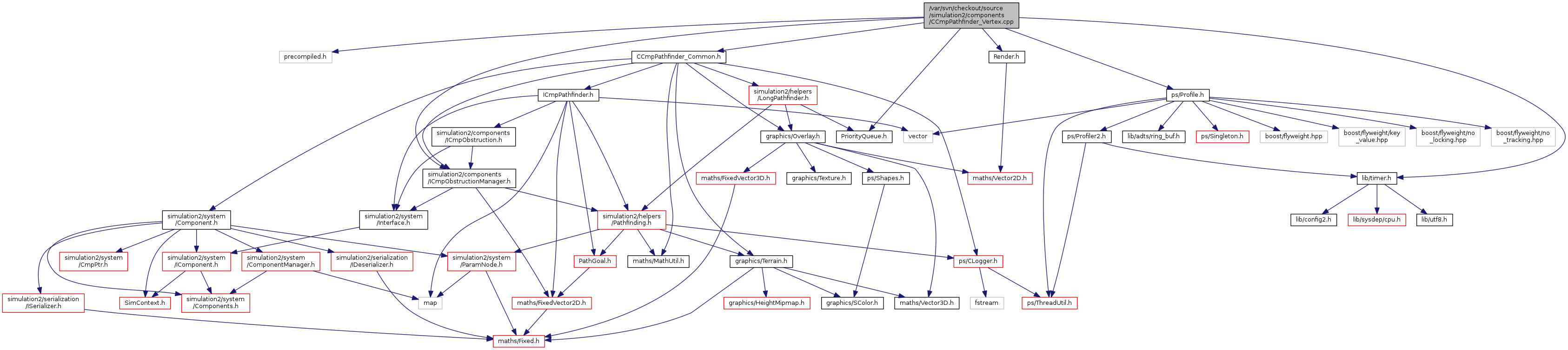
Classes | |
| struct | SquareSort |
| Functor for sorting edge-squares by approximate proximity to a fixed point. More... | |
Macros | |
| #define | PUSH_POINT(p) STMT(xz.push_back(p.X.ToFloat()); xz.push_back(p.Y.ToFloat())) |
Typedefs | |
| typedef PriorityQueueHeap< u16, fixed, fixed > | VertexPriorityQueue |
Functions | |
| static bool | CheckVisibility (const CFixedVector2D &a, const CFixedVector2D &b, const std::vector< Edge > &edges) |
| Check whether a ray from 'a' to 'b' crosses any of the edges. More... | |
| static bool | CheckVisibilityLeft (const CFixedVector2D &a, const CFixedVector2D &b, const std::vector< EdgeAA > &edges) |
| static bool | CheckVisibilityRight (const CFixedVector2D &a, const CFixedVector2D &b, const std::vector< EdgeAA > &edges) |
| static bool | CheckVisibilityBottom (const CFixedVector2D &a, const CFixedVector2D &b, const std::vector< EdgeAA > &edges) |
| static bool | CheckVisibilityTop (const CFixedVector2D &a, const CFixedVector2D &b, const std::vector< EdgeAA > &edges) |
| static void | AddTerrainEdges (std::vector< Edge > &edges, std::vector< Vertex > &vertexes, int i0, int j0, int i1, int j1, pass_class_t passClass, const Grid< NavcellData > &grid) |
| Add edges and vertexes to represent the boundaries between passable and impassable navcells (for impassable terrain). More... | |
| static void | SplitAAEdges (const CFixedVector2D &a, const std::vector< Edge > &edges, const std::vector< Square > &squares, std::vector< Edge > &edgesUnaligned, std::vector< EdgeAA > &edgesLeft, std::vector< EdgeAA > &edgesRight, std::vector< EdgeAA > &edgesBottom, std::vector< EdgeAA > &edgesTop) |
Variables | |
| static const u8 | QUADRANT_NONE = 0 |
| static const u8 | QUADRANT_BL = 1 |
| static const u8 | QUADRANT_TR = 2 |
| static const u8 | QUADRANT_TL = 4 |
| static const u8 | QUADRANT_BR = 8 |
| static const u8 | QUADRANT_BLTR = QUADRANT_BL|QUADRANT_TR |
| static const u8 | QUADRANT_TLBR = QUADRANT_TL|QUADRANT_BR |
| static const u8 | QUADRANT_ALL = QUADRANT_BLTR|QUADRANT_TLBR |
| static const entity_pos_t | EDGE_EXPAND_DELTA = entity_pos_t::FromInt(1)/16 |
Vertex-based algorithm for CCmpPathfinder.
Computes paths around the corners of rectangular obstructions.
Useful search term for this algorithm: "points of visibility".
Since we sometimes want to use this for avoiding moving units, there is no pre-computation - the whole visibility graph is effectively regenerated for each path, and it does A* over that graph.
This scales very poorly in the number of obstructions, so it should be used with a limited range and not exceedingly frequently.
| #define PUSH_POINT | ( | p | ) | STMT(xz.push_back(p.X.ToFloat()); xz.push_back(p.Y.ToFloat())) |
| typedef PriorityQueueHeap<u16, fixed, fixed> VertexPriorityQueue |
|
static |
Add edges and vertexes to represent the boundaries between passable and impassable navcells (for impassable terrain).
Navcells i0 <= i <= i1, j0 <= j <= j1 will be considered.
|
inlinestatic |
Check whether a ray from 'a' to 'b' crosses any of the edges.
(Edges are one-sided so it's only considered a cross if going from front to back.)
|
inlinestatic |
|
inlinestatic |
|
inlinestatic |
|
inlinestatic |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
|
static |
 1.8.11
1.8.11

