|
| bool | NavcellContainsGoal (int i, int j) const |
| | Returns true if the given navcell contains a part of the goal area. More...
|
| |
| bool | NavcellRectContainsGoal (int i0, int j0, int i1, int j1, int *i, int *j) const |
| | Returns true if any navcell (i, j) where min(i0,i1) <= i <= max(i0,i1) min(j0,j1) <= j <= max(j0,j1), contains a part of the goal area. More...
|
| |
| bool | RectContainsGoal (entity_pos_t x0, entity_pos_t z0, entity_pos_t x1, entity_pos_t z1) const |
| | Returns true if the rectangle defined by (x0,z0)-(x1,z1) (inclusive) contains a part of the goal area. More...
|
| |
| fixed | DistanceToPoint (CFixedVector2D pos) const |
| | Returns the minimum distance from the point with the given pos to any point on the outline of the goal shape. More...
|
| |
| CFixedVector2D | NearestPointOnGoal (CFixedVector2D pos) const |
| | Returns the coordinates of the point on the goal that is closest to pos in a straight line. More...
|
| |
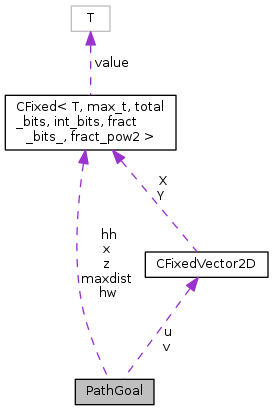
Pathfinder goal.
The goal can be either a point, a circle, or a square (rectangle). For circles/squares, any point inside the shape is considered to be part of the goal. Also, it can be an 'inverted' circle/square, where any point outside the shape is part of the goal.
| bool PathGoal::NavcellRectContainsGoal |
( |
int |
i0, |
|
|
int |
j0, |
|
|
int |
i1, |
|
|
int |
j1, |
|
|
int * |
i, |
|
|
int * |
j |
|
) |
| const |
Returns true if any navcell (i, j) where min(i0,i1) <= i <= max(i0,i1) min(j0,j1) <= j <= max(j0,j1), contains a part of the goal area.
If so, arguments i and j (if not NULL) are set to the goal navcell nearest to (i0, j0), assuming the rect has either width or height = 1.
 1.8.11
1.8.11

